小米su7 ultra的官刷成绩让车迷沸腾。
机车小子团队有幸参与全程,在现场,被一笔笔的新历史数据震撼。
这是能源变革时代的记录,也是中国品牌的记录,本质上,也是中国国产工业能力的记录。因为有保密协议,在流量顶峰,我们不能有丝毫泄漏消息。
现在,全网的ultra开始提车刷街刷赛道,我们再来低调概括下我们在这几笔记录中的工作。



结语:
株洲国际赛车场,小米su7ultra量产版对比仰望U9车载圈速_哔哩哔哩_bilibili
另外,也有车友发出了两辆国产巅峰的对比视频。

赛道上,常胜不好玩,轮流当王才竞猜。 暂不论谁高谁低, 我们都希望国产更好。
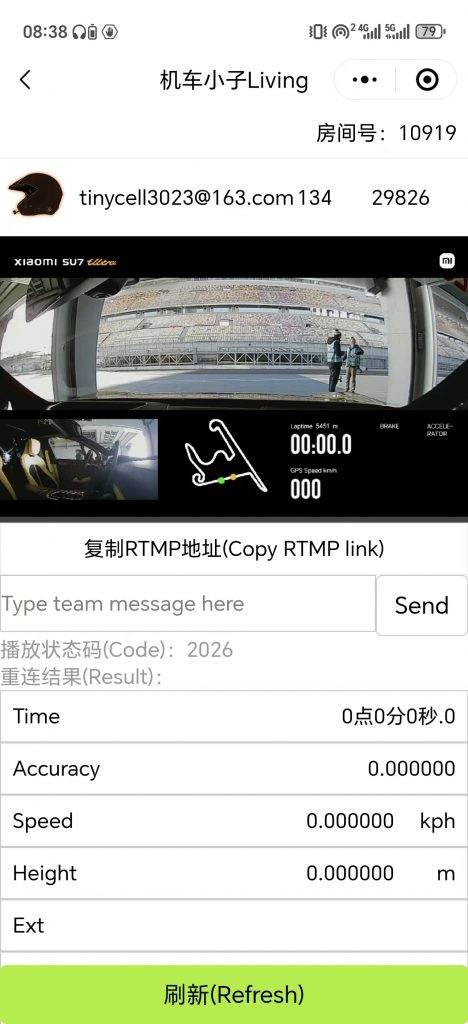
读到这里, 我们引用这个视频,目的是告诉你,在这两个国产车辆的背后,记录下这些数据的,是同一个系统,第三个国产系统——机车小子。
希望大家一起,为赛道做出更多贡献。